二維碼

工博士官方客服微信
聯系方式
聯系方式
電話:18621383605
服務時間 8:30~18:00
返回首頁
回到頂部
庫卡機器人常見運動指令
2018-01-13 13:58:52
問 學完了庫卡機器人的運動指令后,可以了解到哪些?
答(1)通過對機器人幾種基本運動指令的學習,能夠熟練掌握機器人各種軌跡運動的相關編程操作
(2)通過學習PTP運動指令的添加方法,能夠掌握機器人的簡單編程
機器人的運動方式:
機器人在程序控制下的運動要求編制一個運動指令,有不同的運動方式供運動指令的編輯使用,通過制定的運動方式和運動指令,機器人才會知道如何進行運動,機器人的運動方式有以下幾種:
(1)按軸坐標的運動(PTP:Point-toPoint,即點到點)
(2)沿軌跡的運動:LIN直線運動和CIRC圓周運動
(3)樣條運動:SPLINE運動
點到點運動
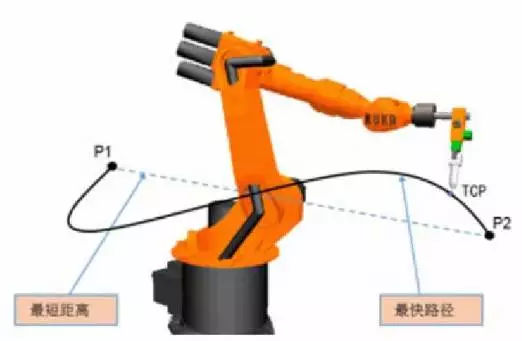
PTP運動是機器人沿*快的軌道將TCP從起始點引至目標點,這個移動路線不一定是直線,因為機器人軸進行回轉運動,所以曲線軌道比直線軌道運動更快。此軌跡無法精確預知,所以在調試及試運行時,應該在阻擋物體附近降低速度來測試機器人的移動特性。
線性運動
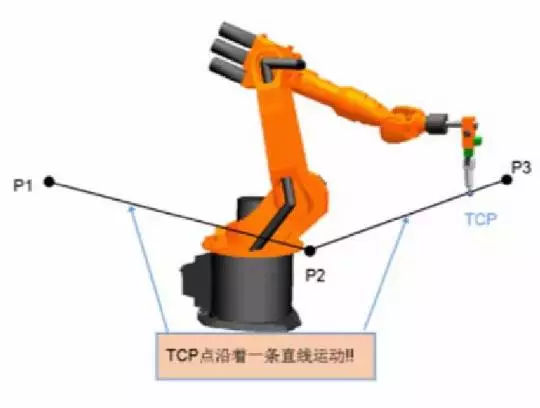
線性運動是機器人沿一條直線以定義的速度將TCP引至目標點。在線性移動過程中,機器人轉軸之間進行配合,是工具或工件參照點沿著一條通往目標點的直線移動,在這個過程中,工具本身的取向按照程序設定的取向變化。
圓周運動
圓周運動是機器人沿圓形軌道以定義的速度將TCP移動至目標點。圓形軌道是通過起點、輔助點和目標點定義的,起始點是上一條運動指令以精確定位方式抵達的目標點,輔助點是圓周所經歷的中間點。在機器人移動過程中,工具尖端取向的變化順應與持續的移動軌跡。
樣條運動
樣條運動是一種尤其適用于復雜曲線軌跡的運動方式,這種軌跡原則上也可以通過LIN運動和CIRC運動生成,但是相比下樣條運動更具有優勢。
創建以優化節拍時間的運動(軸運動)
1 PTP運動
PTP運動方式是時間*快,也是*優化的移動方式。在KPL程序中,機器人的第一個指令必須是PTP或SPTP,因為機器人控制系統僅在PTP或SPTP運動時才會考慮編程設置的狀態和轉角方向值,以便定義一個唯一的起始位置。
2 軌跡逼近
為了加速運動過程,控制器可以CONT標示的運動指令進行軌跡逼近,軌跡逼近意味著將不精確到達點坐標,只是逼近點坐標,事先便離開精確保持輪廓的軌跡。
PTP運動的軌跡逼近是不可預見的,相比較點的精確暫停,軌跡逼近具有如下的優勢:
(1)由于這些點之間不再需要制動和加速,所以運動系統受到的磨損減少。
(2)節拍時間得以優化,程序可以更快的運行。
創建PTP運動的操作步驟
(1)創建PTP運動的前提條件是機器人的運動方式已經設置為T1運行方式,并且已經選定機器人程序。
(2)操作機器人將TCP移向應被設為目標點的位置。
(3)然后將光標放置在其后應添加運動指令的那一行程序中。
(4)點擊菜單序列指令>運動>PTP,作為選項,也可以在相應行中按下軟件運動,選完運動指令后,出現PTP指令的聯機表單。
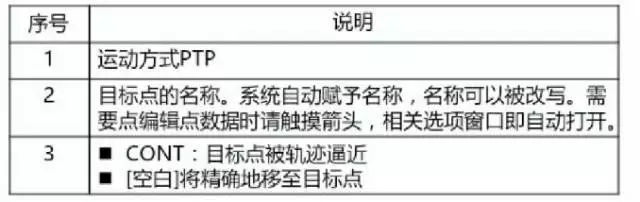
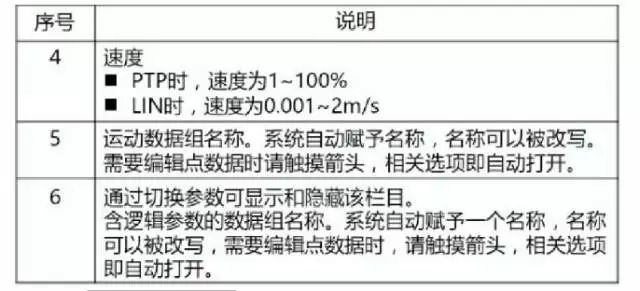
(5)在聯機表單中輸入參數,各個參數含義如下表所示。
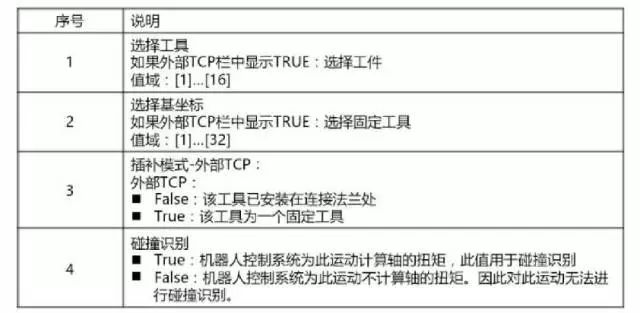
(6)在選項窗口“坐標系”中輸入工具和基坐標系的正確數據,以及關于插補模式的數據和碰撞監控的數據。
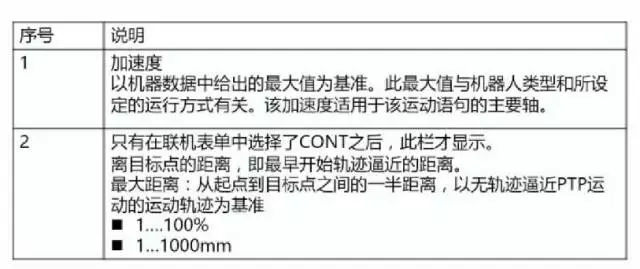
(7)在運動參數選項窗口中可將加速度從*大值降下來。如果已經激活軌跡逼近,則也更改軌跡逼近距離。根據配置的不同,該距離的單位可以設置為mm或%。
(8)點擊指令OK保存指令,TCP的當前位置被作為目標示教。
